Физические науки
1 февраля 2024 года команда во главе с академиком ЯнГуанчжуном из Института медицинской робототехники Шанхайского университета Цзяотун и профессором Тао Гуанъяном из Университета науки и техники Хуачжун опубликовала в онлайновом журнале « Клеточная материя» перспективную статью под названием « Гибкие волоконно - оптические лазерные весы: материалы и производственные задачи».
В статье описывается основной механизм работы и потенциальное применение лазерных скальпелей и робототехники континуума, обсуждается прогресс в их исследованиях в области точной хирургии, предлагаются преимущества и огромные проблемы гибкого волокнистого роботизированного лазерного скальпеля в качестве потенциальной минимально инвазивной технологии хирургической обработки для повышения функциональности и клинической адаптации интеллектуальных медицинских роботов. Кроме того, были определены будущие направления развития в этой области.
Мини - инвазивная хирургия имеет уникальные преимущества безопасности, небольшого разреза и быстрого послеоперационного восстановления, что значительно способствует развитию точной хирургической медицины. С развитием современной медицины и биоинженерии скальпель эволюционировал от единственного металлического ножа до ультразвукового ножа, радиочастотного ножа и т. Д. Это значительно повысило эффективность операции. Однако в сложных хирургических сценариях скальпель имеет такие проблемы, как большой размер устройства, сильная жесткость и недостаточная работоспособность, что серьезно снижает эффективность хирургического лечения. Появление технологии лазерных скальпелей является важной вехой в области точной хирургии и медицины. Многочисленные клинические исследования показывают, что он имеет значительные преимущества высокой точности и эффективности абляции, меньшего кровотечения и небольших побочных эффектов. Имеет широкие перспективы применения в минимально инвазивной хирургической обработке тканей. Тем не менее, высокие требования к механическим и оптическим характеристикам небольших гибких лазерных сред передачи энергии в минимально инвазивной хирургии, а также ограничения интегрированных методов передачи сред с медицинскими роботами создают огромные проблемы для углубленного применения технологии лазерных скальпелей в минимально инвазивной хирургии.
В отличие от традиционных хирургических инструментов, основанных на механической обработке, лазерный скальпель обеспечивает эффективную обработку биотканей благодаря своим уникальным тканевым оптическим эффектам. В статье описывается механизм фототермальной и фотомеханической абляции для удаления мягких и жестких тканей, а также обсуждается прогресс в исследованиях гидродиэлектрической и ультракороткоимпульсной лазерной технологии для уменьшения тепловых повреждений, таких как конденсация и карбонизация тканей (рисунок 1). Кроме того, в статье анализируются характеристики, преимущества и прикладная ценность инфракрасных медицинских источников света, основанных на лазерах Nd, Ho, Tm, ER и CO2, в различных хирургических областях, таких как стоматология и урология, и подчеркиваются основные проблемы, связанные с гибкостью, стабильностью и управляемостью лазерных передающих сред в результате прогресса новых хирургических лазерных источников света.
В качестве ключевого компонента лазерной системы скальпеля лазерная передающая среда должна стабильно доставлять энергию лазера в определенные хирургические участки. В этой системе описывается текущее состояние исследований трех основных медицинских лазерных передающих сред: оптических рукавов, полых волноводов и инфракрасного волокна, и подчеркивается потенциальное применение небольших, высокогибких инфракрасных волоконно - оптических устройств в минимально инвазивной хирургии. В статье всесторонне анализируется прогресс исследований инфракрасных волоконно - оптических устройств, сравниваются характеристики волоконно - оптических устройств в лазерах на эрбие и углекислом газе с точки зрения порога лазерной передачи, оптических потерь и механической гибкости (рисунок 2), указывая, что высокие оптические потери и низкая механическая прочность являются ключевыми факторами, ограничивающими глубокое применение инфракрасных волоконно - оптических устройств в хирургии. В последние годы быстрое развитие многоматериальной волоконно - оптической технологии позволило высокоинтегрировать композитные материалы с различными физическими свойствами, такими как свет, сила, электричество и магнит, что обеспечило надежную исследовательскую поддержку для разработки среднеинфракрасного волокна с высокой гибкостью и низкими потерями и дальнейшего улучшения функциональности хирургического оборудования.
Точный контроль хирургических инструментов является важным фактором для достижения эффективной минимально инвазивной хирургии. Быстрое развитие дисциплин материаловедения и биоинженерии привело к исследованиям в области непрерывной хирургической робототехники с множеством приводов и способствовало развитию точной хирургической медицины. В этой статье всесторонне анализируются движущие силы и характеристики существующих технологий.
Было отмечено, что непрерывные роботы на основе магнитного привода обладают огромным потенциалом для безопасного, точного и интеллектуального хирургического вмешательства. Кроме того, в статье далее предлагается концепция гибкого волоконно - оптического роботизированного лазерного скальпеля. Сочетание лазерного скальпеля и непрерывного медицинского робота способствует его более широкому клиническому применению. Эти системы успешно применяются в урологии, гинекологии и отоларингологии.
Для адаптации к более сложным клиническим физиологическим структурам и хирургическим условиям необходимо дальнейшее улучшение функционирования хирургических инструментов. В этой статье основное внимание уделяется прогрессу медицинских роботов в области позиционирования, визуализации и восприятия информации, а также систем позиционирования на основе электромагнитного слежения (EM) и пражского растрового датчика (FBG), систем визуализации на основе элементов с зарядовой связью (CCD / CMOS) и волоконно - оптических пучков, датчиков силы, А также устройство обратной связи с датчиком температуры. Кроме того, в этой статье предлагается гибкий волоконно - оптический роботизированный лазерный скальпель на основе непрерывной роботизированной архитектуры, которая объединяет функции позиционирования, визуализации и восприятия. Он состоит из непрерывного роботизированного скелета и функционального устройства. Его основными функциями являются лазерная абляция, привод и сбор информации, реализуемые с помощью лазерных передающих сред, приводных модулей и датчиков, встроенных в скелет робота (рисунок 4).
Инновационное развитие хирургических инструментов является важным фактором в содействии быстрому прогрессу точных хирургических медицинских технологий. Лазерный скальпель продолжает развиваться в направлении малого, очень гибкого и эффективного, благодаря глубокой интеграции с навигационным управлением, позиционированием, визуализацией, восприятием информации и другими функциональными устройствами, чтобы удовлетворить более узкие и сложные потребности хирургической среды, сделал много прорывов в клинической области. В конце статьи обобщаются преимущества и огромные проблемы будущего гибкого волоконно - оптического роботизированного лазерного ножа в прецизионной хирургии и обсуждаются будущие направления развития в этой области (рисунок 5): (1) Обсуждаются материалы, структура и производство лазерных передающих сред. Благодаря инновационным высокопроизводительным биологически совместимым материалам и проектированию высокопроизводительных волноводных структур, в сочетании с передовыми методами производства оптического волокна, была достигнута стабильная и эффективная разработка гибких лазерных передающих сред для медицинского лазерного вывода. (2) Драйв, моделирование и зондирование медицинских роботов направлены на изучение механизмов привода и новых конструкций медицинских роботов в узком анатомическом пространстве для достижения точной и безопасной хирургической диагностики и операций. (3) Разработка полиматериализованного волокнистого оборудования обеспечивает более гибкие и интеллектуальные хирургические инструменты для клинических вмешательств. (4) Конструкция и производство ультрасовременных микронаноструктур оптического волокна обогащает многорежимную стратегию работы волоконно - оптических роботов. Распределенное зондирование боковых поверхностей волоконно - оптического волокна дает роботу возможность точно получать локальную информацию об окружающей среде.
Цзоу Юци, Рен Чжихэ, Сян Юаньчжуо и Лю Чао, аспиранты Университета науки и техники Хуачжун, являются соавторами диссертации. Академик Ян Гуанчжун из Шанхайского университета Цзяотун и профессор Тао Гуанмин из Университета науки и техники Хуачжун являются соавторами диссертации. В число сотрудничающих организаций также входит Сианьский институт оптической точной механики Китайской академии наук. Эта работа поддерживается такими проектами, как Национальная ключевая программа исследований и разработок, Национальный фонд естественных наук и Программа поддержки перекрестных исследований Университета науки и техники Хуачжун.
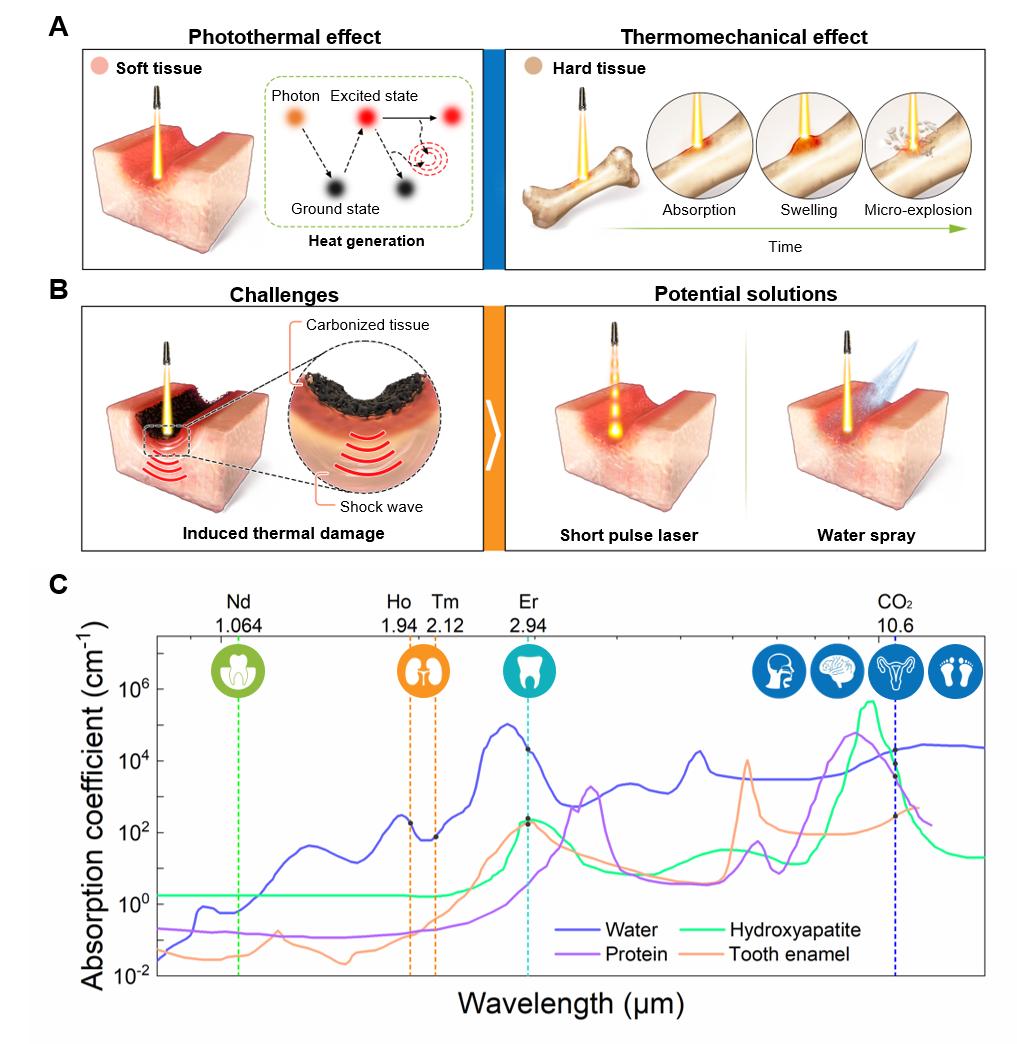
Рисунок 1: Лазерный абляционный механизм и клиническое применение.

Рисунок 2 Типичное среднеинфракрасное волоконно - оптическое устройство и сравнение его характеристик.
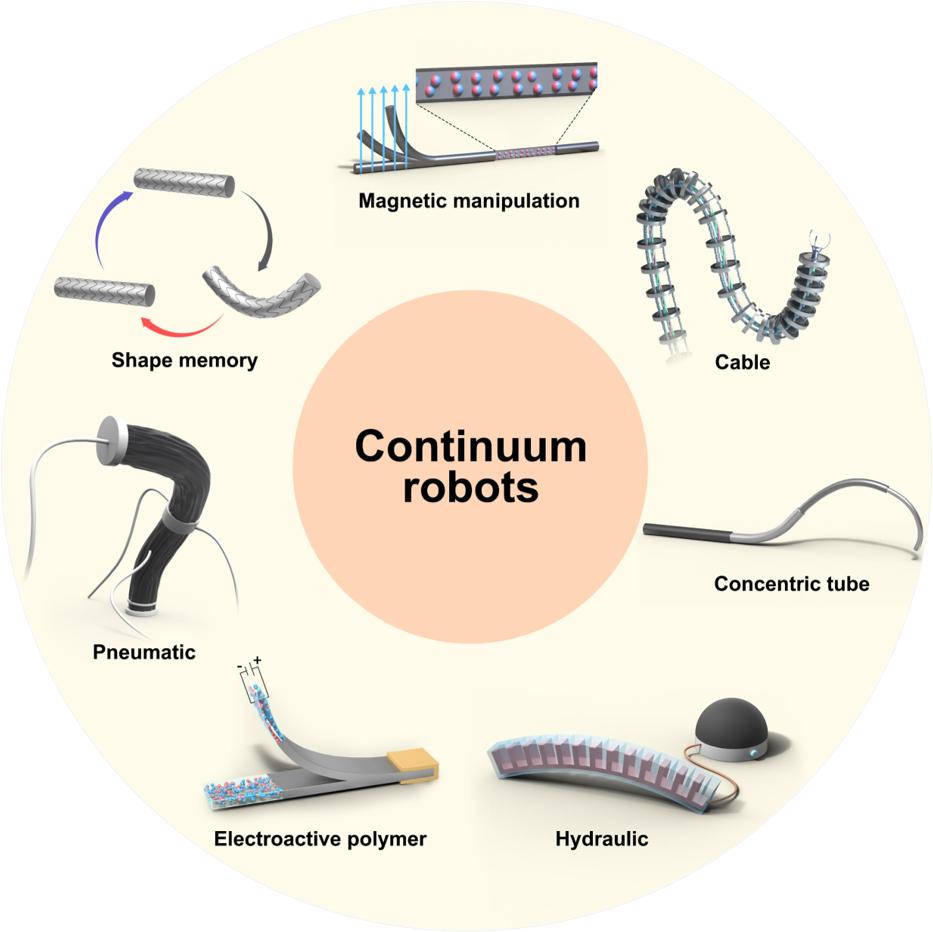
Рисунок 3 Методы привода медицинских континуумов.
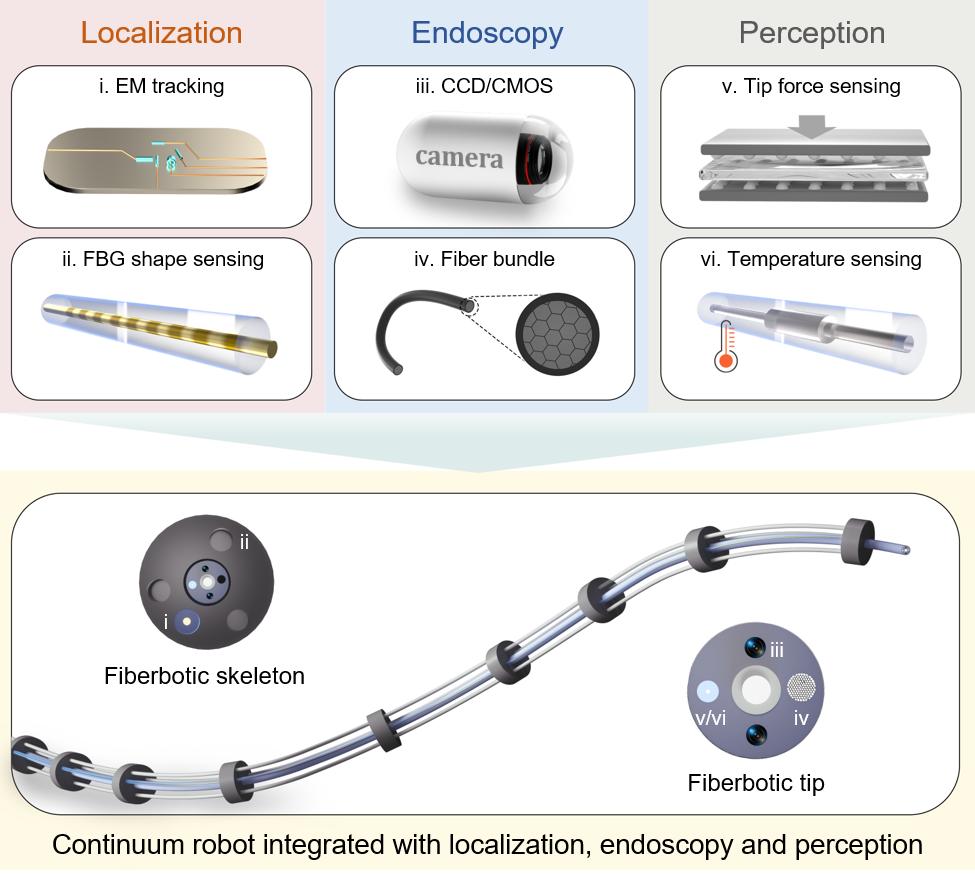
Рисунок 4: Многофункциональный континуум - робот, способный находить, визуализировать и воспринимать.

Рисунок 5: Будущие гибкие волоконно - оптические роботизированные лазерные скальпели.
